梯度下降基础概念
机器学习中的大部分问题都是优化问题,而绝大部分优化问题都可以使用梯度下降法处理。因此相关的基础概念十分重要。
微分/导数
- 积分「Integral」
- 微分「Differential」(求积分 = 求导数「Derivative」= 求斜率「Slope」)
f′(x0)=Δx→0limΔxΔy=Δx→0limΔxf(x0+Δx)−f(x0)
偏导数
∂xj∂f(x0,x1,…,xn)=Δx→0limΔxΔy=Δx→0limΔxf(x0,…,xj+Δx,…,xn)−f(x0,…,xj,…,xn)
提示
∂xj∂ 和 dy/dx 一样,只是代表标记。
导数与偏导数本质是一致的,都是当自变量的变化量趋于0时,函数值的变化量与自变量变化量比值的极限。直观地说,偏导数也就是函数在某一点上沿坐标轴正方向的变化率。
区别在于:
- 导数,指的是一元函数中,函数y=f(x)在某一点处沿x轴正方向的变化率;
- 偏导数,指的是多元函数中,函数 y=f(x1,x2,…,xn )在某一点处沿某一坐标轴(x1,x2,…,xn) 正方向的变化率
方向导数
导数和偏导数的定义,均是沿坐标轴正方向讨论函数的变化率。那么当讨论函数沿任意方向的变化率时,也就引出了方向导数的定义,即:某一点在某一趋近方向上的导数值。
∂l∂f(x0,x1,…,xn)=ρ→0limΔxΔy=ρ→0limρf(x0+Δx0,…,xj+Δxj,…,xn+Δxn)−f(x0,…,xj,…,xn)
ρ=(Δx0)2+⋯+(Δxj)2+⋯+(Δxn)2
通俗的解释是:我们不仅要知道函数在坐标轴正方向上的变化率(即偏导数),而且可能还要设法求得函数在其他特定方向上的变化率。而方向导数就是函数在其他特定方向上的变化率。
梯度
gradf(x0,x1,…,xn)=(∂x0∂f,…,∂xj∂f,…,∂xn∂f)
函数在某一点的梯度是这样一个向量,它的方向与取得最大方向导数的方向一致,而它的模为方向导数的最大值。即
- 梯度是一个向量,即有方向有大小;
- 梯度的方向是最大方向导数的方向;
- 梯度的值是最大方向导数的值;
向量理解
偏导数与方向导数是向量吗?
偏导数和方向导数表达的是函数在某一点沿某一方向的变化率,也是具有方向和大小的。
- 因此从这个角度来理解,我们可以把偏导数和方向导数看作是向量。
- 向量的方向就是变化率的方向,向量的模是变化率的大小。
那么沿着这样一种思路,就可以如下理解梯度:梯度即函数在某一点最大的方向导数,函数沿梯度方向函数有最大的变化率。
梯度下降法
直观理解
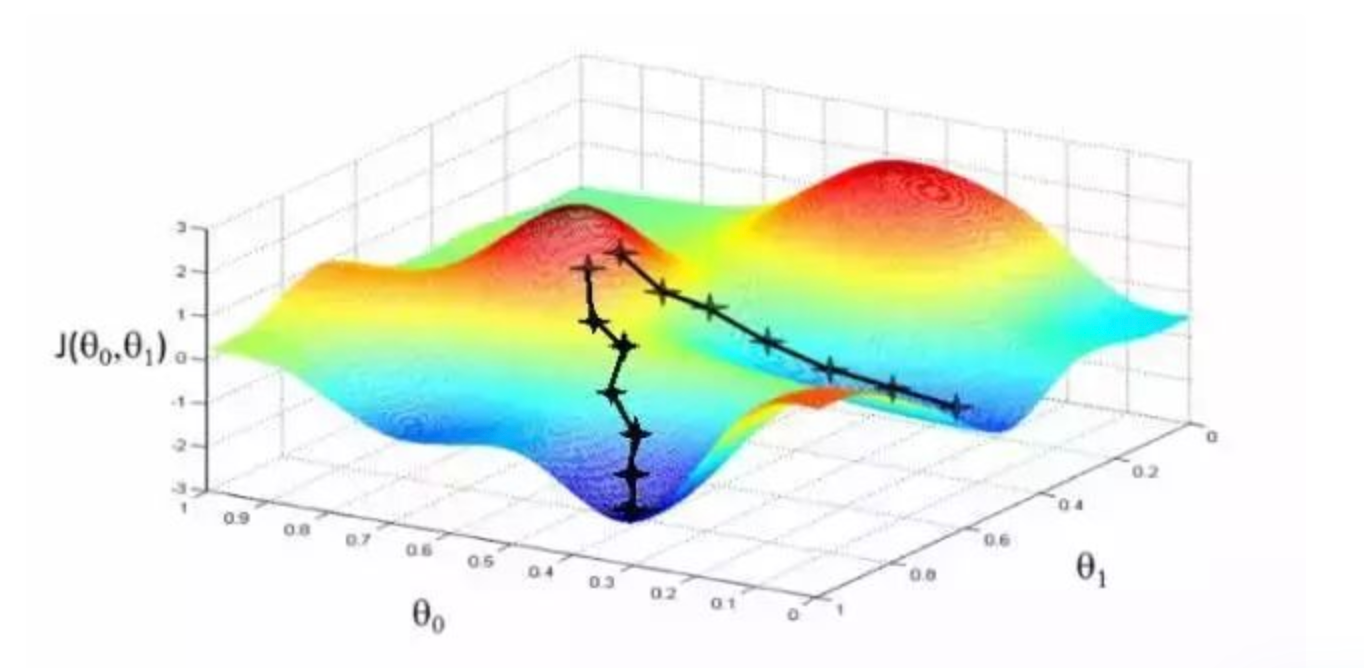
首先来看看梯度下降的一个直观的解释。比如我们在一座大山上的某处位置,由于我们不知道怎么下山,于是决定走一步算一步,也就是在每走到一个位置的时候,求解当前位置的梯度,沿着梯度的负方向,也就是当前最陡峭的位置向下走一步,然后继续求解当前位置梯度,向这一步所在位置沿着最陡峭最易下山的位置走一步。这样一步步的走下去,一直走到觉得我们已经到了山脚。当然这样走下去,有可能我们不能走到山脚,而是到了某一个局部的山峰低处。
 1675222832117.png
1675222832117.png从上面的解释可以看出,梯度下降不一定能够找到全局的最优解,有可能是一个局部最优解。当然,如果损失函数是凸函数,梯度下降法得到的解就一定是全局最优解。
做法
既然在变量空间的某一点处,函数沿梯度方向具有最大的变化率,那么在优化目标函数的时候,自然是沿着负梯度方向去减小函数值,以此达到我们的优化目标。
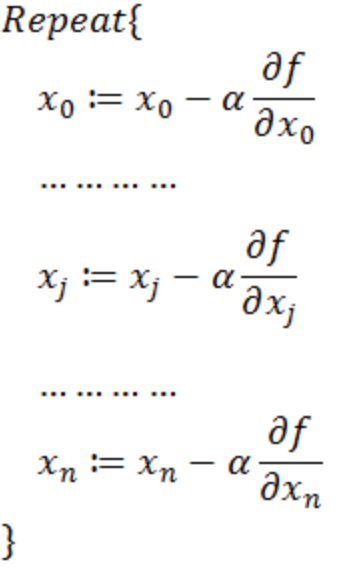
如何沿着负梯度方向减小函数值呢?梯度和偏导数都是向量,那么参考向量运算法则,我们在每个变量轴上减小对应变量值即可,梯度下降法可以描述如下
正确性讨论
虽然每次我们将梯度看做向量,但是计算的时候是分方向计算的。
梯度下降法并不是下降最快的方向,它只是目标函数在当前的点的切平面(当然高维问题不能叫平面)上下降最快的方向。
相关信息
牛顿方向(考虑海森矩阵)才一般被认为是下降最快的方向,可以达到Superlinear的收敛速度。梯度下降类的算法的收敛速度一般是Linear甚至Sublinear的(在某些带复杂约束的问题)。
何时停止
If J(θ0,θ1) decreases by less than a threshold 𝜀 (e.g., 10-3) in one iteration
- Each iteration, we use all 𝑚 training examples to update θ0,θ1
- Use updated θ0,θ1 to recalculate J(θ0,θ1) and find the decrease
偏导公式推导
 CleanShot 2023-02-01 at 11.34.46@2x.png
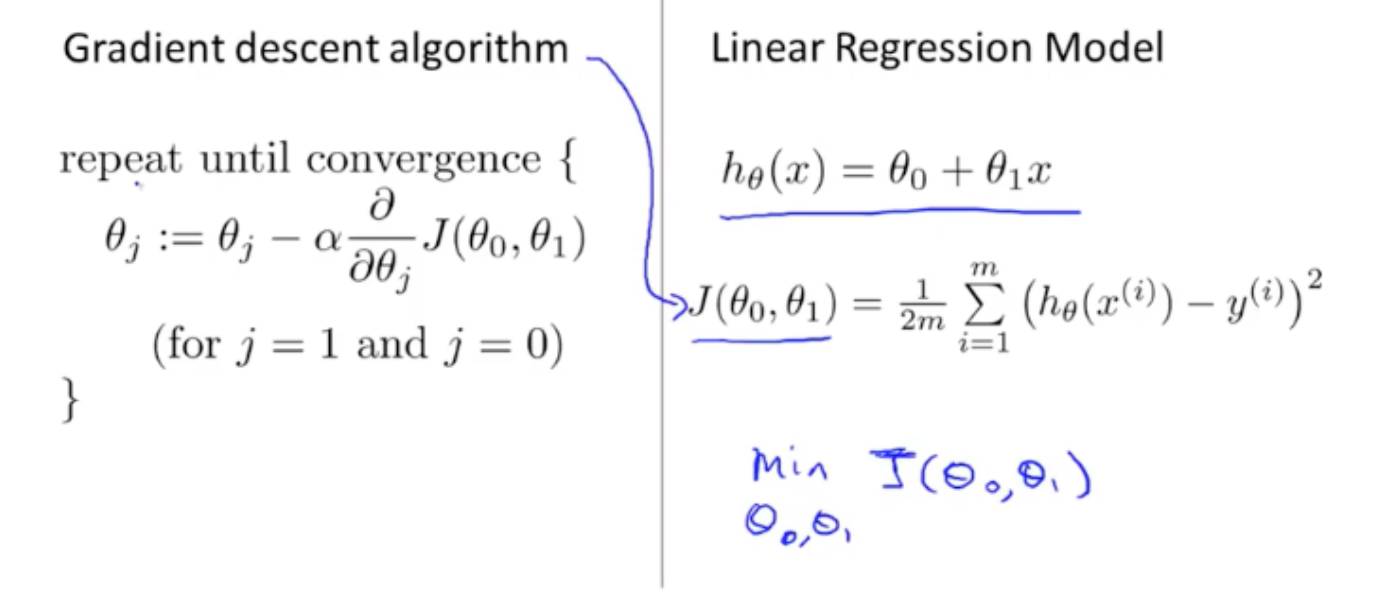
CleanShot 2023-02-01 at 11.34.46@2x.png这里关心 J(θ0,θ1) 的偏导数的计算
根据导函数的加法运算法则(f + g)' = f' + g',也就是多个函数的和的导数等于各函数的导数的和,我们可得到
∂θj∂J(θ0,θ1)=2m1i=1∑m∂θj∂((hθ(x(i))−y(i))2)
又根据复合函数的求导法则f'(g(x)) = f'(u)g'(x),有
∂θj∂J(θ0,θ1)=2m1i=1∑m2(hθ(x(i))−y(i))∂θj∂(hθ(x(i))−y(i))=m1i=1∑m(hθ(x(i))−y(i))∂θj∂(θ0+θ1x(i)−y(i))......(1)
余下部分的偏导就比较简单了,它是对一个二元一次函数的自变量求偏导,根据偏导的定义,对求偏导数时,我们把看作常数,对求偏导数时,我们把看作常数。于是有:
∂θ0∂(θ0+θ1x(i)−y(i))=1
∂θ1∂(θ0+θ1x(i)−y(i))=x(i)
把上面两式分别带入(1)式可得:
∂θ0∂J(θ0,θ1)=m1i=1∑m(hθ(x(i))−y(i))
∂θ1∂J(θ0,θ1)=m1i=1∑m(hθ(x(i))−y(i))x(i)
Ref