Spatial Clustering
Spatial Clustering
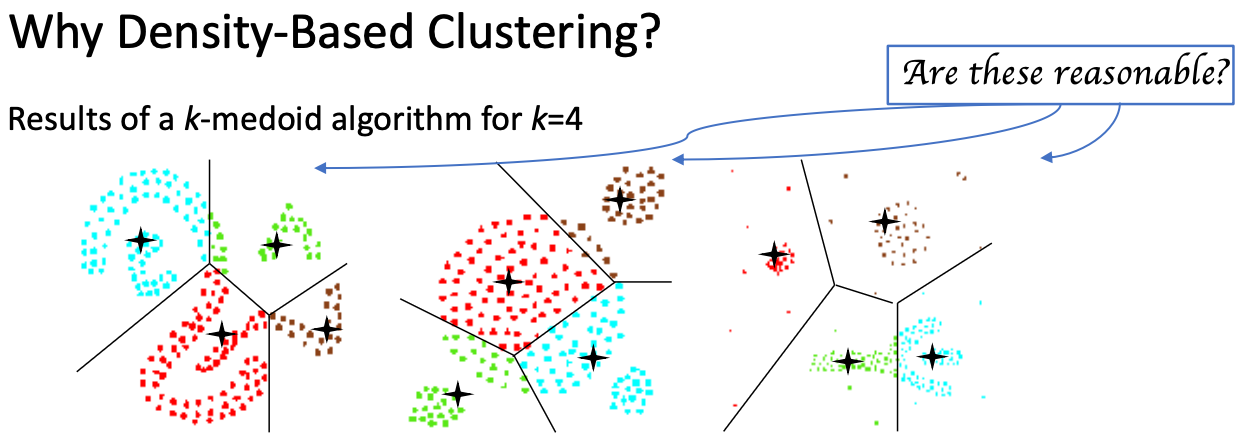
Why Density-Based Clustering methods「基于密度的聚类方法」?
- 发现任意形状的簇
- 簇「cluster」 – 物体密集区域被低密度区域分隔开来
DBSCAN – the first density based clustering
DBSCAN -> Density Based Spatial Clustering of Applications with Noise 「基于密度的噪声应用空间聚类」
- 基于密度的集群概念:这意味着数据点被分组(或聚集)在一起基于它们的“密度”,即数据点的紧密程度。想象一下,你有很多点散布在一张纸上,那些彼此靠近的点会形成一个“群体”或集群。
- 集群被定义为密度连接点的最大集合:在这里,“集群”是指一群彼此靠得很近的点。所谓“密度连接”,就是指一个点的周围有足够多的其他点,使得它们可以被视为一个单一的组或集群。
- 在有噪声的空间数据库中发现任意形状的集群:这表明这种方法能够在包含许多随机分布(即“噪声”)的数据中找到集群,而且这些集群可以是任何形状的,不仅仅是圆形或椭圆形。
Density Based Clustering
基本思想形式化的直觉:
- 对于簇中的任何点,该点周围的局部点密度必须超过某个阈值
- 一个群组的点集在空间上是相连的
由两个参数定义的点 p 处的局部点密度
- ε - 点 p 附近的半径: , like 圆的半径就是ε
- MinPts - 给定邻域中的最小点数 N(p) 【至少需要有多少个点,个区域才能被认为是“密集”的,从而形成一个集群。】
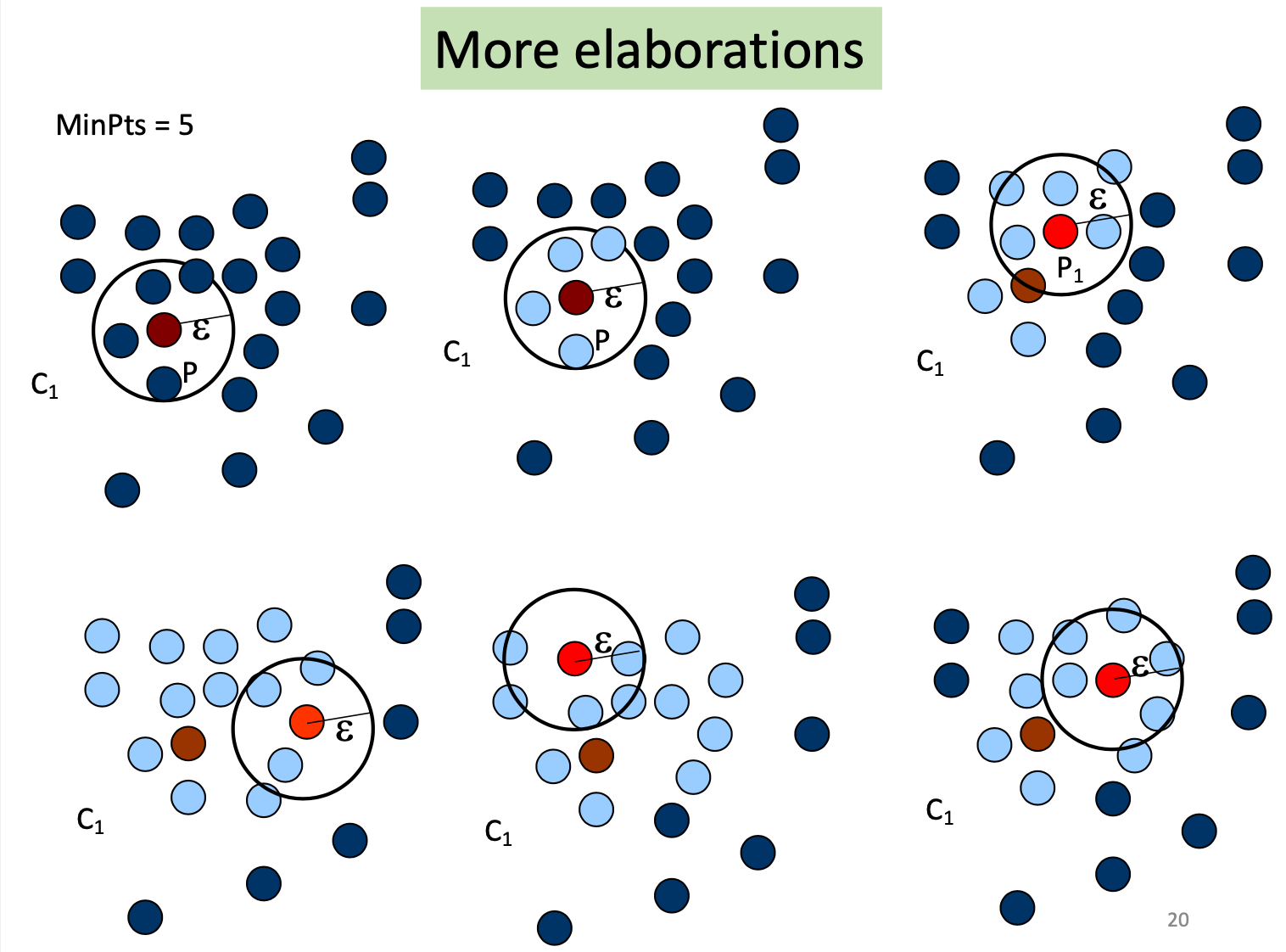
Example
假设你在一个海滩上放飞无人机,无人机的相机可以看到下面的人。你要用这个无人机来找出海滩上的热门区域。
使用ε,你设置了无人机相机的焦距,定义了它能清晰看到地面上的一个特定大小的区域。比如说,你把焦距设置得能看到直径为10米的圆形区域。
接下来,你决定至少要在这个10米直径的圆形区域内看到15个人,这个区域才算是热门的。这个“15”就是你的MinPts。
现在,无人机飞过海滩,每次都在地面上标记出一个10米的圆形区域,并数里面的人。如果一个圆形区域内有15个或更多的人,那么这个区域就被标记为热门区域,或者说是一个“集群”。如果人少于15个,那么这个区域就被忽略了,因为它没有达到你设置的密集标准。通过这种方式,无人机可以帮你找到海滩上所有的热门区域。
ε-Neighborhood
ε-Neighborhood: 距物体 ε 半径内的物体。
“高密度”- 对象的 ε-Neighborhood 至少包含 MinPts 个对象。
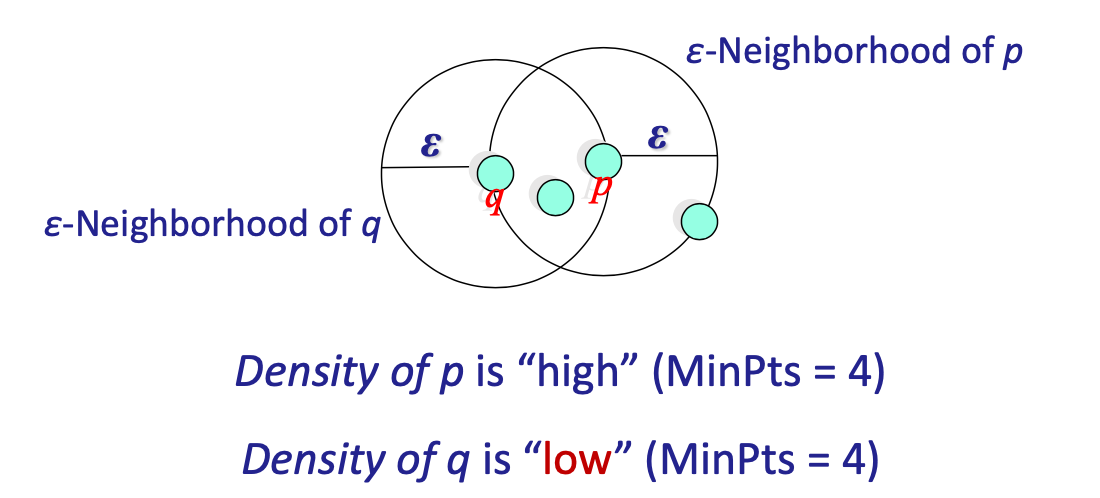
MinPts
ε-Neighborhood 至少包含 MinPts 个对象,计数包含中心本身。
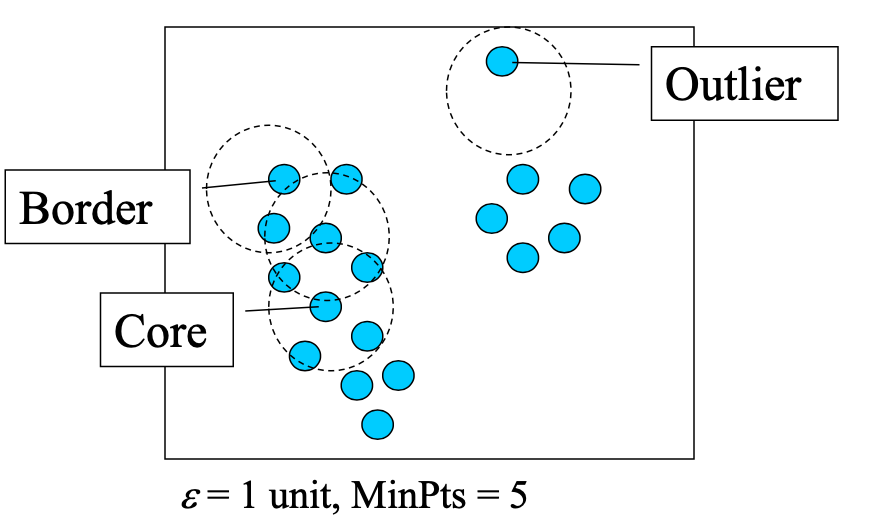
Core, Border & Outlier
给定 ε 和 MinPts,我们可以将对象分为三个不同的组。
- 如果一个点在 Eps 范围内的点数(MinPts)超过指定数量,则该点为 core point。这些点位于群集的内部。
- border point 在 Eps 范围内的最小点数少于 MinPts,但位于核心点附近。
- noise point/outlier 是指任何既不是核心点也不是边界点的点。
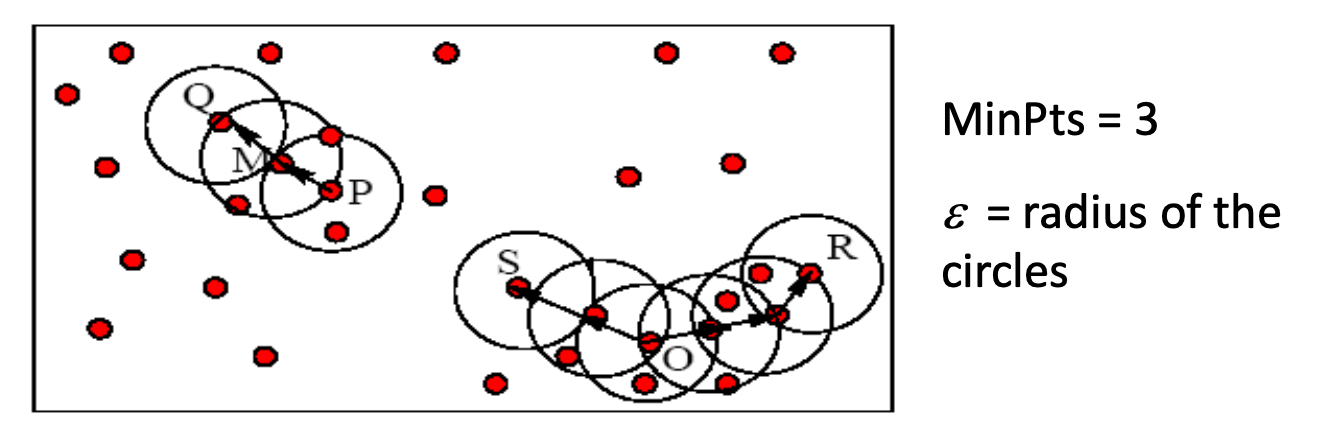
在下面的 Example, M、P、O 和 R 是core point(在 Q、M、P、S、O、R 中),因为它们每个都位于包含至少 3 个点的 ε-Neighborhood 中
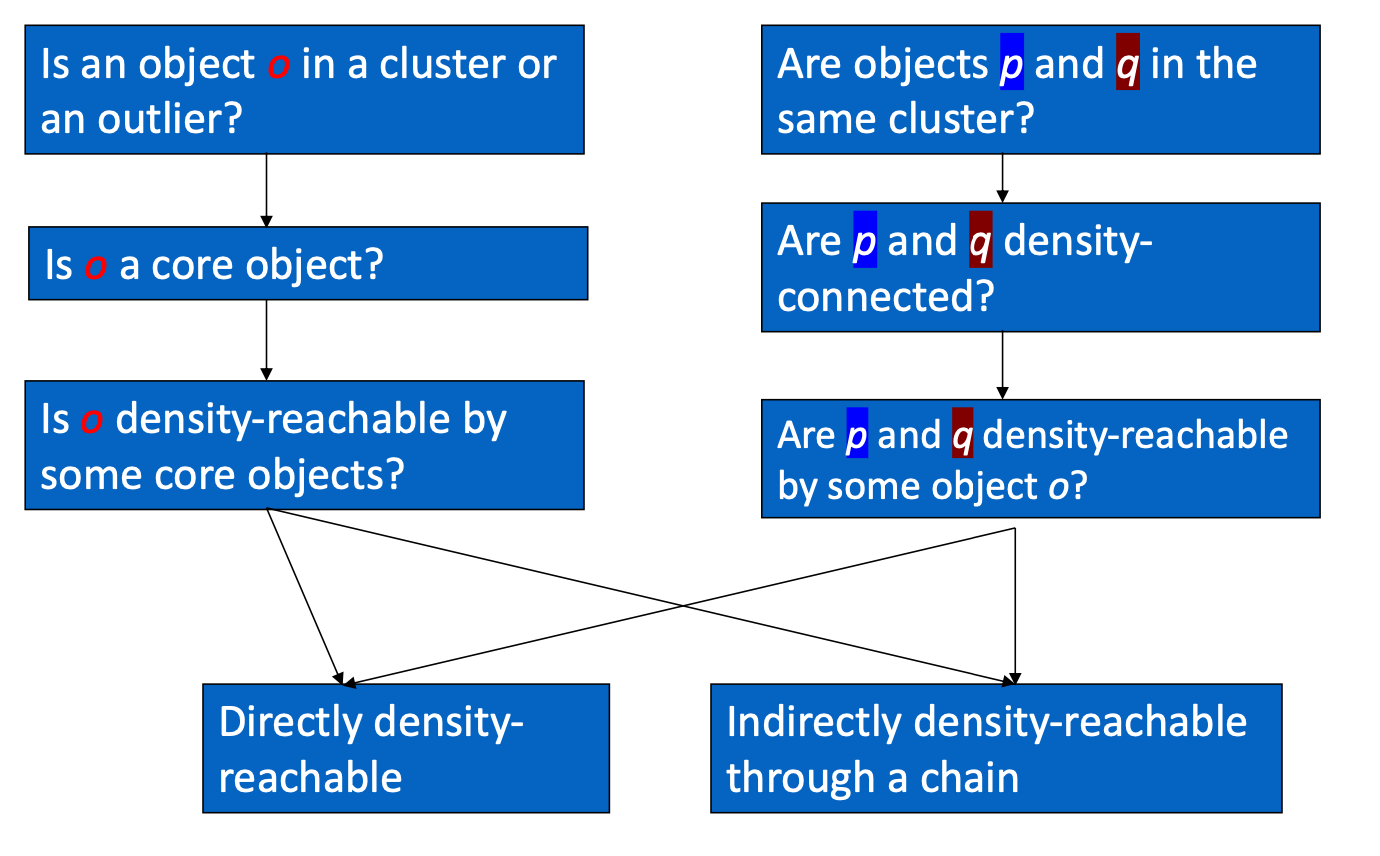
Density Reachability
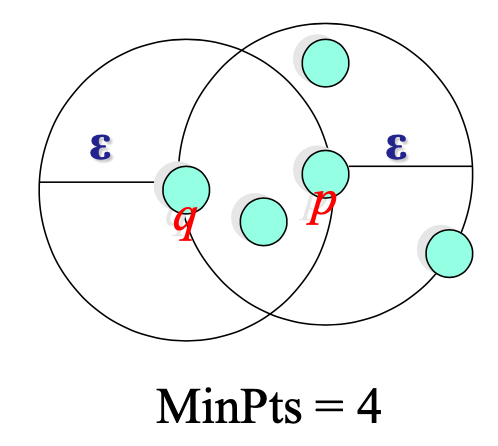
Directly Density-Reachable
- 如果 p 是核心对象,
- 且 q 位于 p 的 ε-Neighborhood 中,
则object q is directly density-reachable from object p
特别注意
是两个条件都要成立,而且
- q 是从 p 直接密度可达的
- p 不是从 q 直接密度可达的
- 密度可达性是不对称的
Indirectly Density-Reachable
- p 是从p2 直接密度可达的;
- p2 是从p1 直接密度可达的;
- p1 是从 q 直接密度可达的;
p <- p2 <- p1 <- q 形成一条链
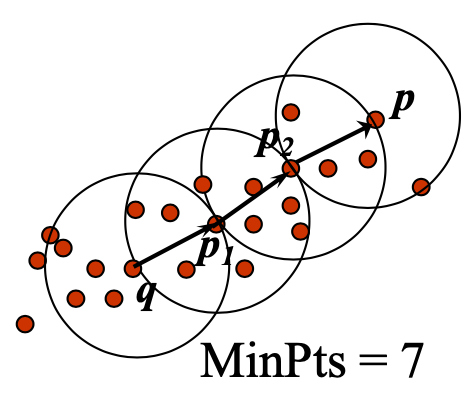
p is (indirectly) density-reachable from q
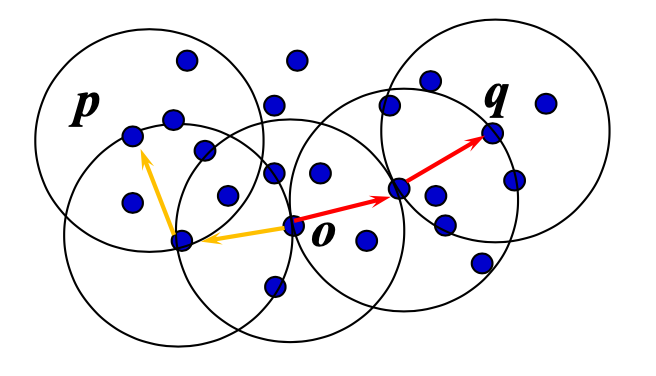
Density-Connectivity
- Density-Reachable is not symmetric, not good enough to describe clusters.
- Density-Connected: 如果一对点 p 和 q 从点 o 密度可达,则它们是密度连通的。
- 密度连通性是对称的
Formal Description of Cluster
- Given a data set D, parameter ε and threshold MinPts.
- 集群 C 是满足下面三个标准的对象子集(具有核心点和边界点)
- Connected: ∀ p,q ∈ C: p and q are density-connected.
- Maximal: ∀ p,q: if p ∈ C and if q is density-reachable from p (p is a core point), then q ∈ C.
提示
一个团队就像是一个集群,因为其成员之间都是相互连接的,并且它包括了所有通过团队成员可以相互到达的人,没有遗漏。
DBSCAN: The Algorithm
初始化
- 设定参数
ε(邻域大小)和MinPts(成为核心点所需的最小邻居数)。 - 创建两个空列表:
clusters用于存储集群的集合,noise用于存储噪声点。 - 创建一个集合
visited用于跟踪已经访问过的点。 - 数据集中的每个点都会被标记为未访问。
程序主体
对于数据集中的每个点p:
- 检查
visited集合来确定p是否已经处理。如果p已经访问过,则跳过此点。 - 将
p标记为已访问(将p添加到visited集合) - 获取
p的 ε-Neighborhood 中的所有点, 即执行一个范围查询,找出所有与p的距离小于等于ε的点 - 检查邻居数量是否少于
MinPts。- 如果是,将 p 标记为噪声点,添加到 noise 列表,然后继续处理下一个点。(即进行下一个循环周期)
- 如果不是,继续下一步来形成一个新的集群。
- 创建一个新的集群
C,并将p添加到C(这里C是一个新的列表或集合) - 将
p的所有邻居加入到C。这些邻居现在是p的直接密度可达点。 - 对于
C中的每个点q- 如果
q未访问- 将q标记为已访问,添加到
visited集合中。 - 获取q的 ε-Neighborhood 中的所有点, 即执行一个范围查询,找出所有与q的距离小于等于ε的点
- 如果q的ε-邻域中至少有MinPts个点,这意味着q是一个核心点。因此,你将q的所有未处理的邻居点加入集群C。
- 将q标记为已访问,添加到
- 如果
q访问,需要再次获取q的ε-邻域或标记q,因为这已经在之前的步骤中完成。 - 这个过程是递归的,意味着我们不仅查看直接邻居,还要查看邻居的邻居,以此类推。
- 如果
- 当
C中没有更多的点可以加入时,当前集群完成。 将C加入到clusters列表中。
重复这个过程,直到所有点都被访问。
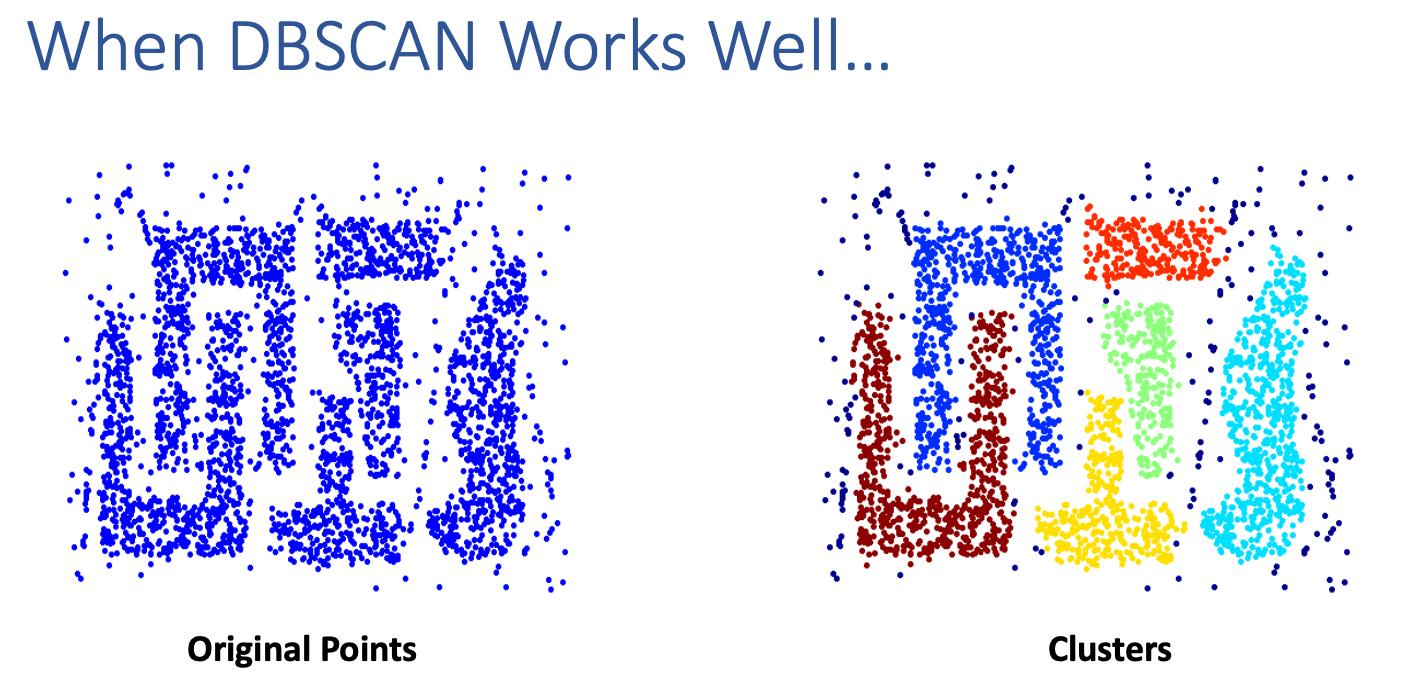
- Resistant to Noise
- Can handle clusters of different shapes and sizes
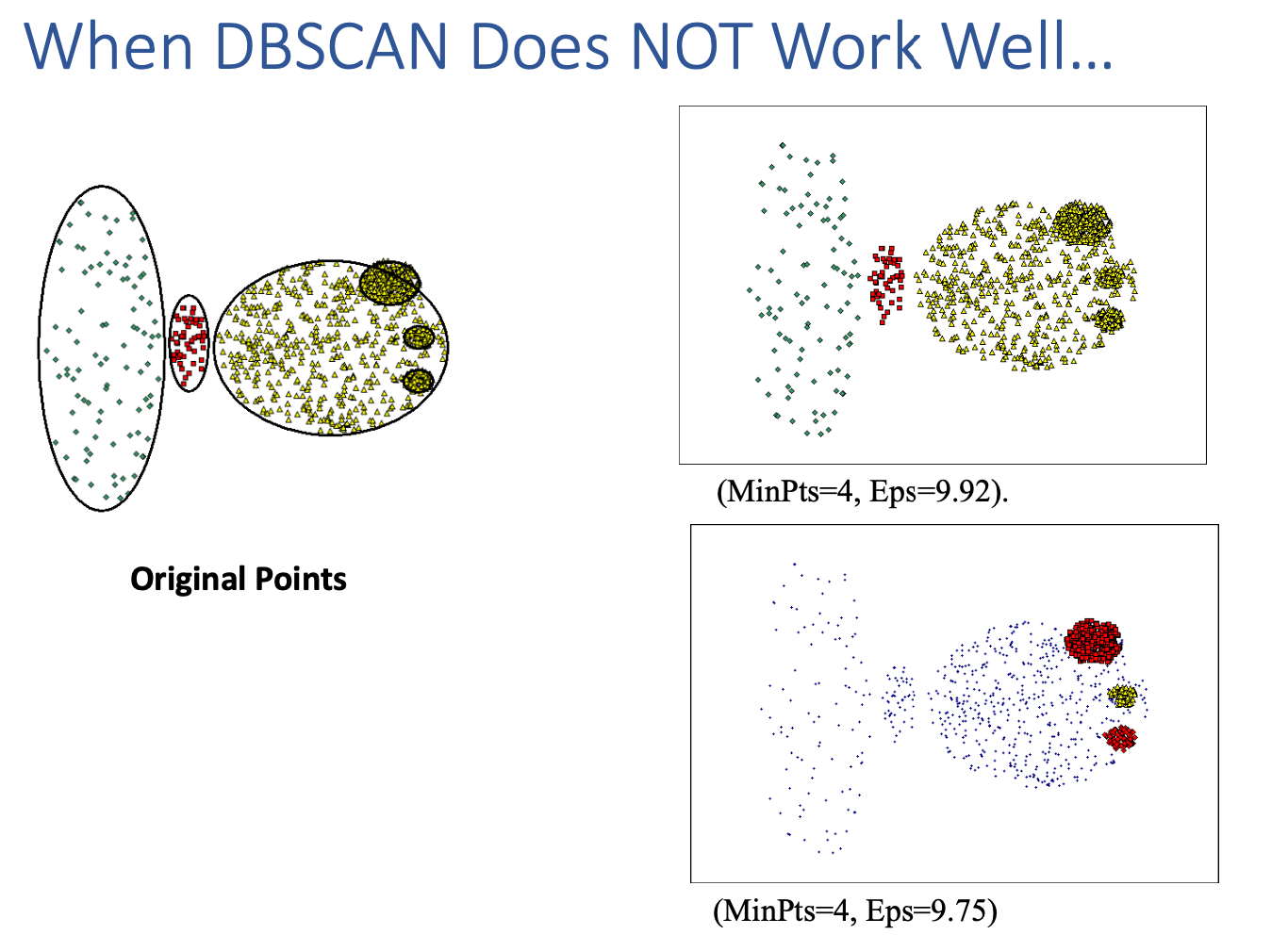
- 对参数敏感!
- 无法处理不同的密度!
Determining Parameters
确定DBSCAN算法中的参数ε(邻域大小)和MinPts(最小点数)是一个挑战,因为这些参数会直接影响到算法能够识别出的集群的数量和大小。
- Cluster: 在一个区域内,如果点的数量(密度)超过了我们设定的门槛,那么这个区域就可以被称作一个集群。
- 想法:为了找出合适的参数,我们可以考虑数据集中最不密集的那些集群。我们希望即使是这些不那么明显的集群,也能够被算法识别出来。
- 一种找出
ε的方法是观察数据点到其第k近邻的距离。这个距离可以帮助我们估计出ε的大小。
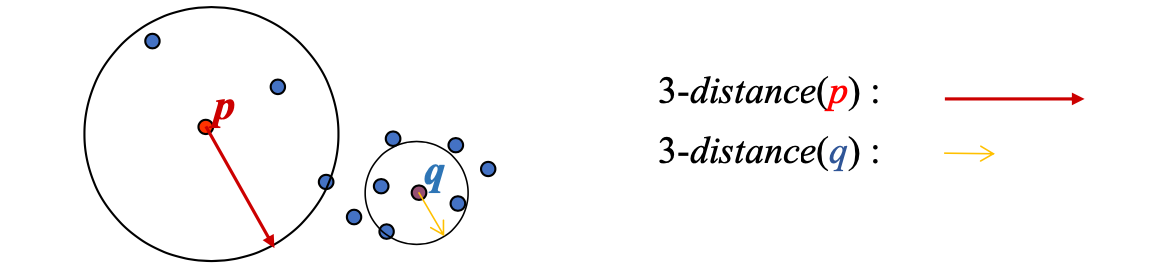
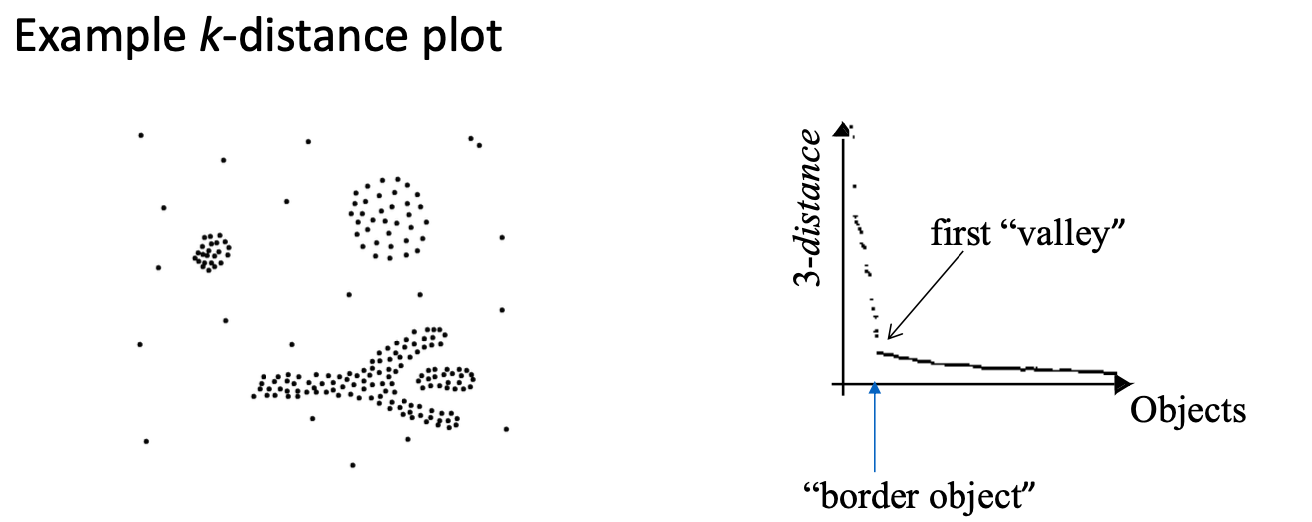
- k-distance函数:这是一个函数,它告诉我们每个点和它的第k个最近邻居的距离是多少。
- k-distance图:这是一个图表,它按照距离从大到小排列了所有点的k-distance值。
步骤
- 确定MinPts:
MinPts是一个阈值,决定了一个点需要多少个邻居才能被认为是一个核心点。这个值通常取决于数据的维度(d)。一个常用的方法是将MinPts设为2 * (d - 1)。所谓维度,就是描述数据点的属性数量。比如,在一个二维空间中,每个点由两个坐标(比如x和y)来描述。 - 选择边界对象o:在
MinPts-距离图上,用户选择一个所谓的“边界对象”。这个对象代表了边界点和核心点之间的临界点。 - 设定ε:一旦选择了边界对象o,
ε就被设定
假设你正在分析一个三维空间中的星系数据(因此d=3)。根据上述公式,你将MinPts设为2 * (3 - 1) = 4。这意味着一个星系需要至少有4个邻近星系才能被认为是一个集群的核心部分。
然后,你绘制了一个MinPts-距离图,这个图显示了每个星系与其第4个最近邻星系的距离。在这个图上,你注意到有一个特定的星系o,它的第4个最近邻的距离突然比周围星系的距离大了很多。这个距离可能是100光年。
因此,你将ε设定为100光年。这意味着在你的星系数据中,如果一个星系在100光年的范围内至少有4个邻居,那么它就可以被视为一个集群的一部分。
Discussion
优势
- 聚类可以有任意的形状和大小
- 可自动确定聚类的数量
- 可将聚类从周围的噪音中分离出来
缺点
- 输入参数可能难以确定
- 在某些情况下对输入参数设置非常敏感